Searching for a socially competent robot
So there I am, standing in front of the closed door to room 0.353 in the computer science building, knocking... and nobody opens. At least I can see the name "Nasiru Aboki, M.Sc." on the nameplate. But on this September morning, no one seems to be able to tell me when I will meet the real person. Or can they?
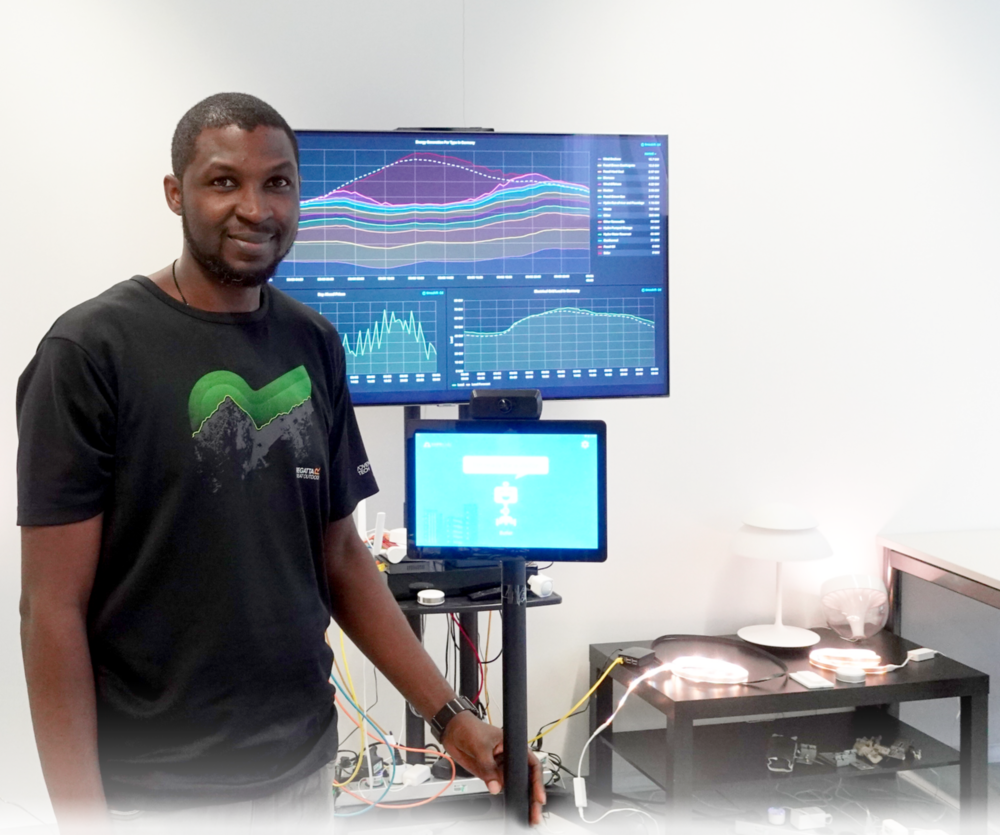
A little later, we eventually find each other and Aboki tells me about a robot with many social skills. It is supposed to independently greet guests or collect contact information for absent office staff. Sounds like exactly what I could have used at the closed gate before, but it is still a long way off. A comprehensive framework is needed to implement such an assistant. That is exactly what the doctoral student has been working on for almost a year and a half now.
His research is built on a telepresence robot from the manufacturer OhmniLabs. It can be described as a mobile platform on three wheels that looks a bit like a vacuum cleaner robot; a rod is attached to the black chassis, on which the camera, screen and loudspeaker are mounted. Pretty complete for a remote-controlled communication solution, but nowhere near enough for Aboki's goals.
Modular upgrades for additional applications
Because the robot is supposed to act autonomously in the end, it has to know its surroundings and should also detect moving obstacles - after all, by no means should the system intrude into people's personal space or even run over visitors completely. So Aboki has added a laser sensor for this purpose. A 3D camera could follow in the future. Moreover, the mobile robot communicates wirelessly with other external services from the Internet and permanently installed sensors of the IoT infrastructure in the lab.
As with the hardware, Aboki can also extend the capabilities of the robot's software. The open-source Robotic Operating System (ROS) serves as the development platform; with modules running on it, the machine assistant could also recognize human faces in the future or fulfil many more tasks, such as running errands between different people.

Students create components for mapping, recognition and communication
Aboki is not the only one who will continue to explore potential usage scenarios and their implementations in the coming months. The department's students also keep contributing partial solutions and have already completed projects for mapping, object recognition and communication within the lab environment.
Supervised by Prof. Dr. Marco Aiello, Aboki himself plans to have completed and defended his dissertation on "Autonomous Robotic Systems for Human Support in Offices" by the end of 2024.
